

松下驱动器50针引脚定义三菱伺服放大器接线图(松下伺服50芯插头接口图)
1、首先启动GX Developer,点击菜单的工程--创建新工程,如下图所示。
2、在PLC类型中选择FXCPU,PLC系列选择FX3U(C),然后点击确定按钮,如下图所示。
3、在左侧栏位选择找到参数--PLC参数,然后双击PLC参数,如下图所示。
4、在弹出的FX参数设置界面,点击内存容量设置--勾选定位块设置(18块),然后点击结束设置按钮,如下图所示。
5、接着在FX参数设置界面选择定位设置--详细设定,如下图所示。
6、最后在定位表中给出了DVIT,PLSV,DRVI,DRVA。。。定位指令,用Y0控制第一轴的定位程序如下所示,就完成了。
伺服插头50针正负极接线方法如下:
1、松下A6脉冲型伺服驱动器抱闸接线,50芯插头10号引脚接0V,11号引脚接继电器线圈一端,继电器线圈另一端接24V。
2、继电器常开触点一端接另一个开关电源的24V,常开触点另一端接一根电机抱闸线,另一根抱闸线接0V,抱闸的线一端接在电机插头上面。
3、另外一端通过继电器接到24V电源。值得注意的是24V没有正负之分,可随意接线。
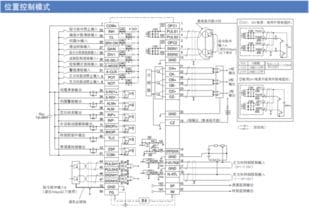
松下伺服有位置模式(脉冲控制),速度模式和转矩模式(io控制)三种。
后两者直接用plc输出到驱动器指定的io端口即可控制,当然要设定必要的参数,如模式设定,转速大小,转矩大小等。
位置模式较为常用,用于定位场所使用。可以使用正反脉冲控制,也可以使用脉冲加方向控制。对于接线请参照伺服驱动器说明书。可以正确的控制,关键在于接线正确和参数设定正确。
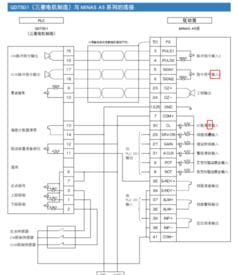
印象中的接线如下:
伺服驱动器侧plc侧
1,2,7------接外部24v
4----------正脉冲y0
6----------反脉冲y1
29---------伺服使能输出点
31---------报警清除输出点
37---------伺服报警输入点
19---------伺服z相高速计数器端口或1pg的pg0-端
25,36,41---接外部0v
以上,若编码器z相19脚不使用,则25脚不接,若报警信号37不使用,则36脚不接。
对于速度模式和扭矩模式请参照手册进行布线。
伺服参数设定需要看好伺服驱动器类型,是a4的还是a5的,这两种参数设定是不一样的。
这个上面是有标识的,你可以用手电筒照一下是可以看清楚的。
宽处左边上是1,下右边是2。这个接脚,你是可以通过下载松下a5伺服的使用手册里面对这些接线都是有详解的
[img]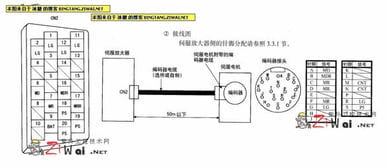
 0
0  0
0  0
0  0
0  0
0  0
0  0
0  0
0  0
0  0
0 